
Alaabta


YST-125 Gacan-qabsiga Manipulator Caawinta Mootada
Sharaxaad Gaaban:
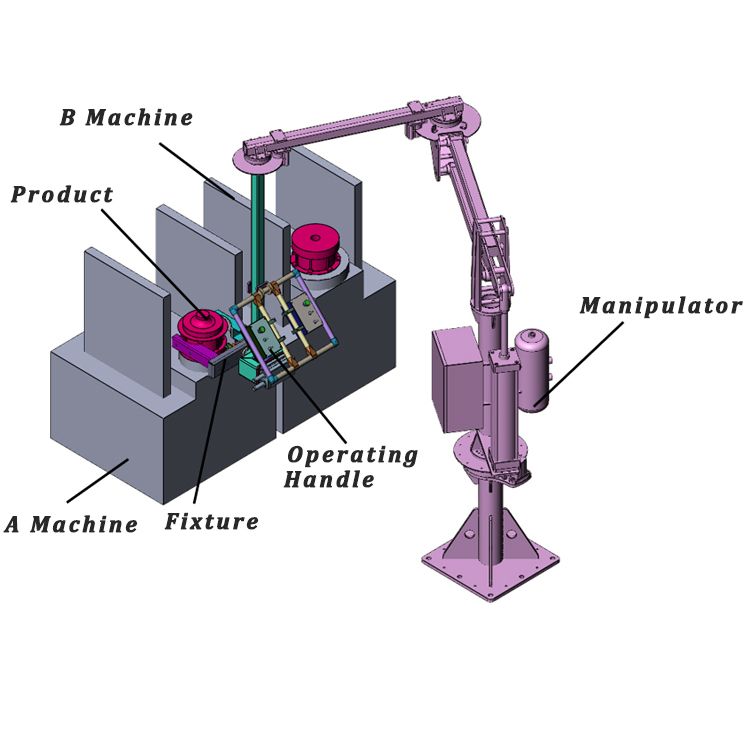
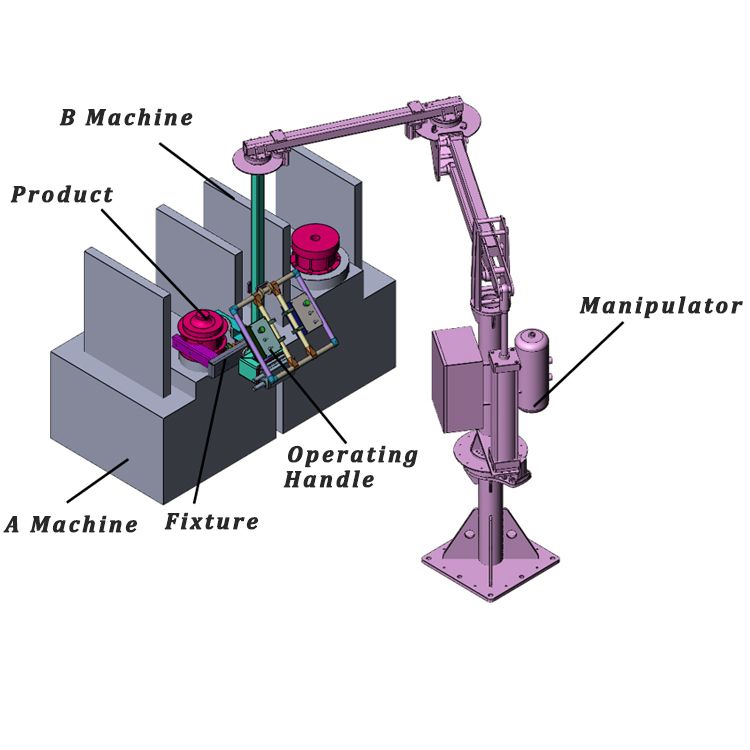
Manipulator-ka awooda lagu caawiyay, oo sidoo kale loo yaqaan wiishka dheelitirka, waa qalab cusub oo awood lagu kaalmeeyo oo loogu talagalay maaraynta alaabta iyo hawlgalka badbaadinta shaqada inta lagu jiro rakibidda.

Waxay si xariif ah u dabaqaysaa mabda'a dheelitirka xoogga, si uu hawlwadeenku u riixo oo u jiido miisaanka si waafaqsan, ka dibna wuxuu u dhaqaaqi karaa oo booska booska si dheellitiran. Haddii aan la helin hawl-socod xirfad leh, hawlwadeenku waxa uu ku riixi karaa oo ku jiidi karaa shayga culus gacanta, shayga culusna waxa loo dhigi karaa meel kasta oo bannaan oo sax ah.

Qaadashada manipulator-ka caawiyay, xal fudud ayaa ah in lagu dhejiyo boosteejada dhulka ee manipulator-ka caawiyay saxan weyn oo bir ah si uu u noqdo miisaan ka-hortagga manipulator-ka iyo culayska guud. Kadibna, adoo ku dhejinaya fargeetada saxanka birta, cutubka si fudud ayaa loogu dhaqaajin karaa meel kasta oo leh fargeeto. Waxaan ugu yeernaa manipulator-ka gacan-ku-taagga gacanta.
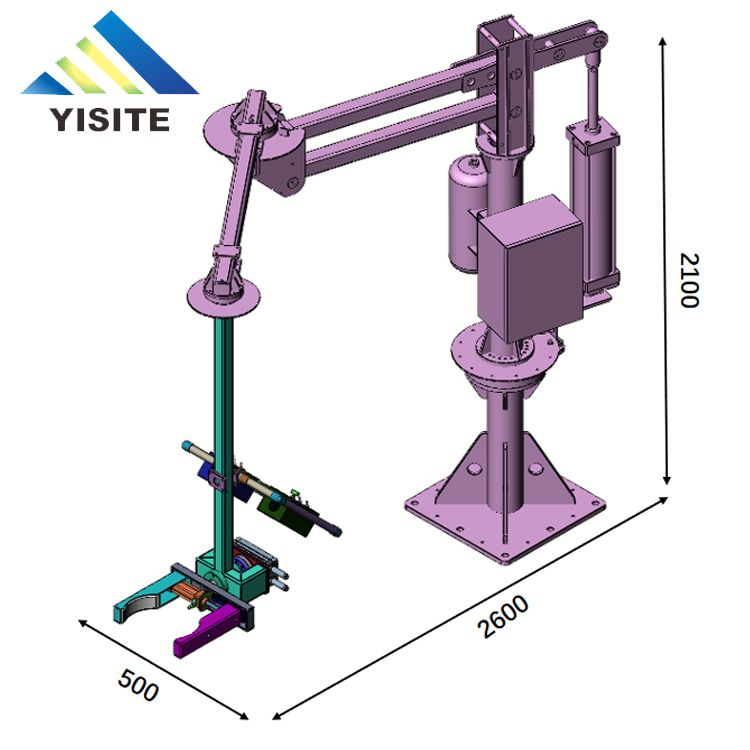
Manipulator-ka lagu caawiyay awoodda, qalabka ayaa loo habeyn karaa iyadoo loo eegayo baahiyaha, wuxuuna ku habboon yahay maaraynta iyo rarista iyo dejinta qaybaha kala duwan ee shaqada. Miisaanka badeecadu waa 50KG, raadiyaha shaqada ee manipulator waa 2.5 mitir, dhererka qaadista waa 1.3 mitir.

nagu saabsan

Waxaan nahay soo saare qalab otomaatig ah oo xirfad leh loo habeeyey. Alaabadayada waxaa ka mid ah qalabka wax lagu duubo, mashiinka wax lagu duubo, palletizer, codsiga is dhexgalka robot, dejinta iyo dejinta manipulators, kartoon samaynta, xirida kartoonnada, suufka palette, mashiinka duubista iyo xalalka kale ee otomatiga ah ee khadka soo saarista baakadaha dambe.
Aagga warshadeenu waa qiyaastii 3,500 mitir oo laba jibbaaran. Kooxda farsamada ee xudunta u ah waxay leeyihiin celcelis ahaan 5-10 sano oo waayo-aragnimo ah farsamaynta farsamada, oo ay ku jiraan 2 injineerada naqshadaynta farsamada. 1 injineer barmaamij, 8 shaqaale ururiye ah, 4 qof iibka iibka ka dib ah, iyo 10 shaqaale oo kale
Mabda'ayadu waa "macmiilka marka hore, tayada ugu horeysa, sumcadda marka hore", waxaan had iyo jeer ka caawinnaa macaamiisheena "kordhinta awoodda wax soo saarka, yareynta kharashka, iyo hagaajinta tayada" waxaan ku dadaaleynaa inaan noqono alaab-qeybiyaha ugu sarreeya ee warshadaha otomaatiga ah ee mashiinka.
Manipulator-ka awooda fiilada
| Qaabka | YST-125 | |
| qaab-dhismeedka farsamada | Manipulator la caawiyay | |
| qaabka loo fuliyo | Semi-automation-ka | |
| Miisaanka Palletizing (aan lahayn qalab) | 20kg | |
| dhidibka dhaqdhaqaaqa | 3 dhidibka | |
| Dhaqdhaqaaqa Range | dhidibka Z (kor hoos) | 1400mm |
| dhidibka 1 (Spin) | 0-300° | |
| dhidibka 2 (Spin) | 0-300° | |
| dhidibka 3 (Spin) | 0-300° | |
| radius lafdhabarta ugu badan | 2000mm | |
| Miisaanka jidhka (oo aan lahayn qalab) | 200kg | |
Faahfaahinta Alaabta
1. Manipulator-ka gacanta lagu caawiyo wuxuu leeyahay shaqo joojin buuxda, hawlgalkuna waa mid fudud oo bilaash ah;
2. Manipulator-ka-caawinta waxaa lagu soo saaraa iyadoo loo eegayo mabaadi'da ergonomics, hawlgalkuna waa mid raaxo leh oo ku habboon;
3. Naqshadeynta qaab-dhismeedka manipulator-ka gacan-ku-haynta moobilka waa qaab-dhismeed, iyo xakamaynta wareegga hawada ayaa la isku daray;
4. Manipulator-ka gacan-ku-haynta gacanta waxa uu ka caawinayaa dhimista kharashka shaqada 50%, hoos u dhigida xoogga shaqada 85%, iyo kordhinta waxtarka wax soo saarka 50%;
5. Manipulator-ka gacanta lagu caawiyo waxa loo habeeyey iyadoo loo eegayo culayska alaabta iyo istaroogga hawlgalka, oo leh qaabab kala duwan si loo daboolo baahiyo kala duwan.









